Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Descrição
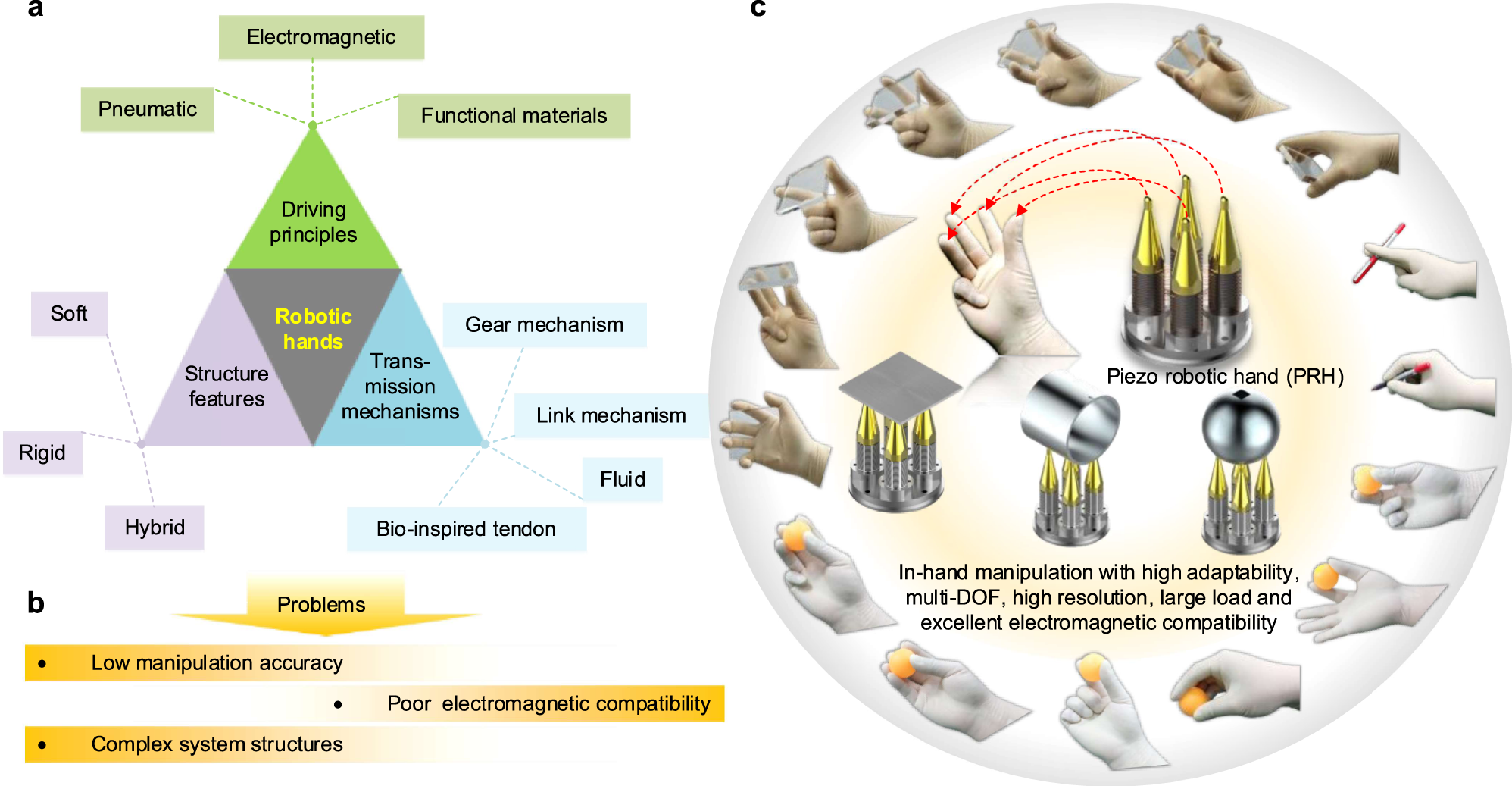
Piezo robotic hand for motion manipulation from micro to macro

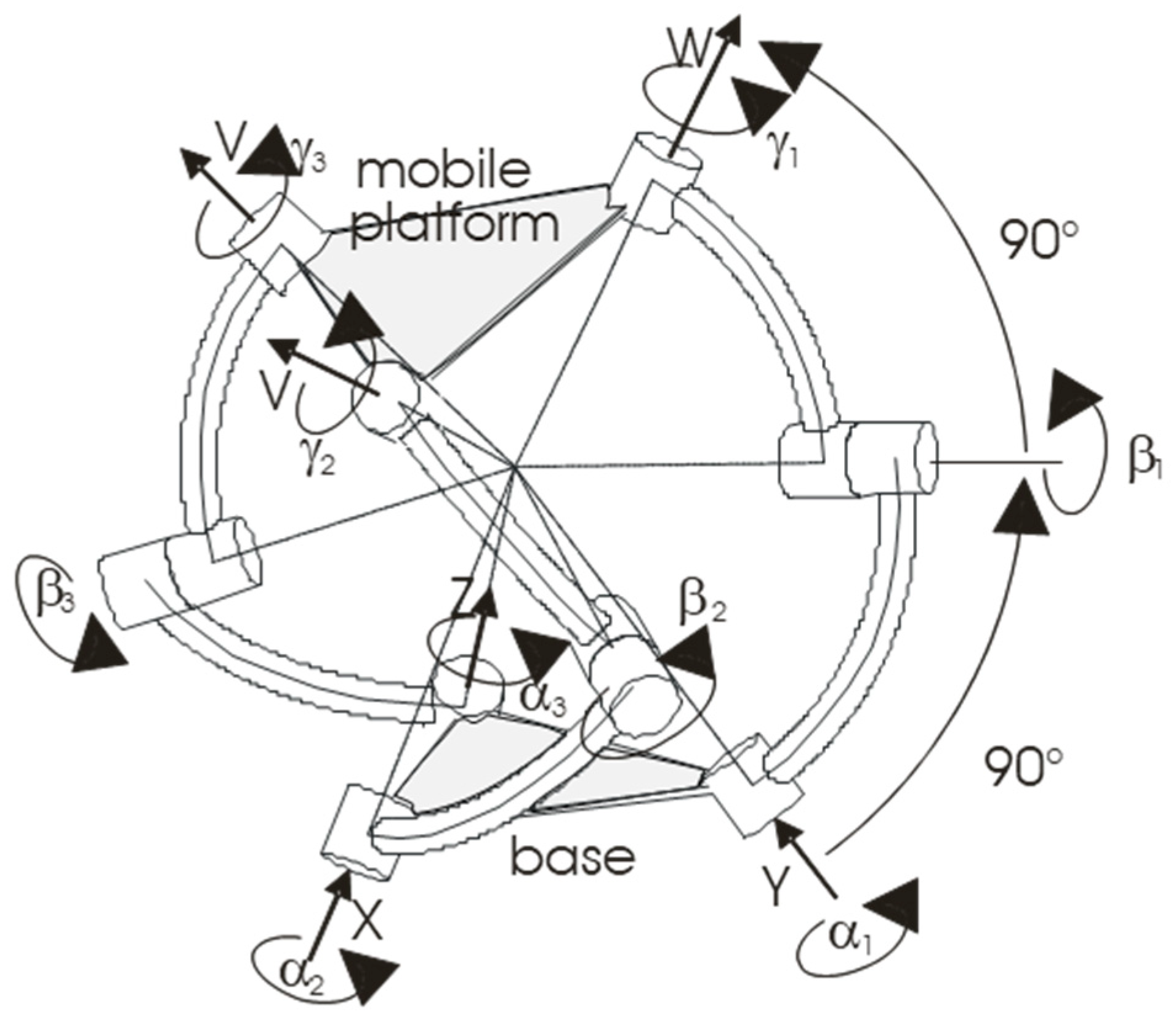
Design and kinematic analysis of a 3-RRR spherical parallel manipulator reconfigured with four–bar linkages - ScienceDirect
Robotics, Free Full-Text
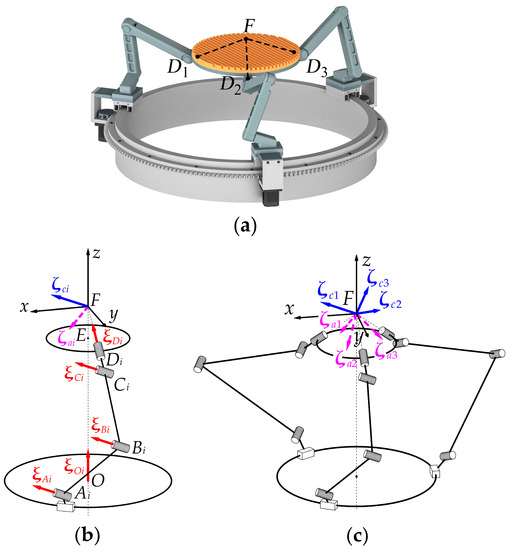
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)

Parallel manipulator - Wikipedia
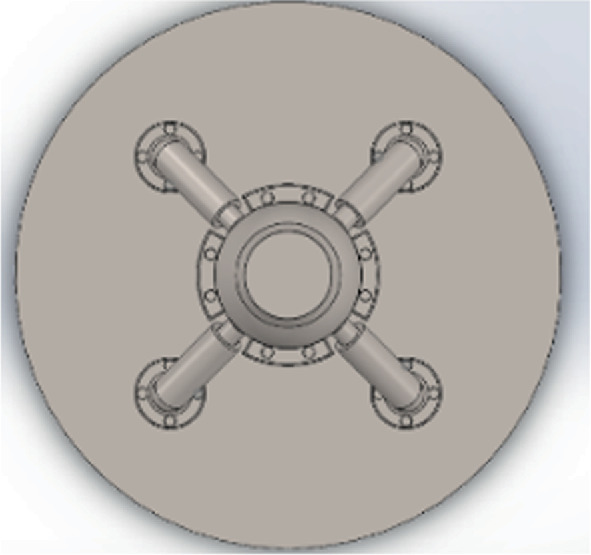
Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators

Robotic Arm Design: Types & Components of Robotic Arms

Mechanism Design for Robotics
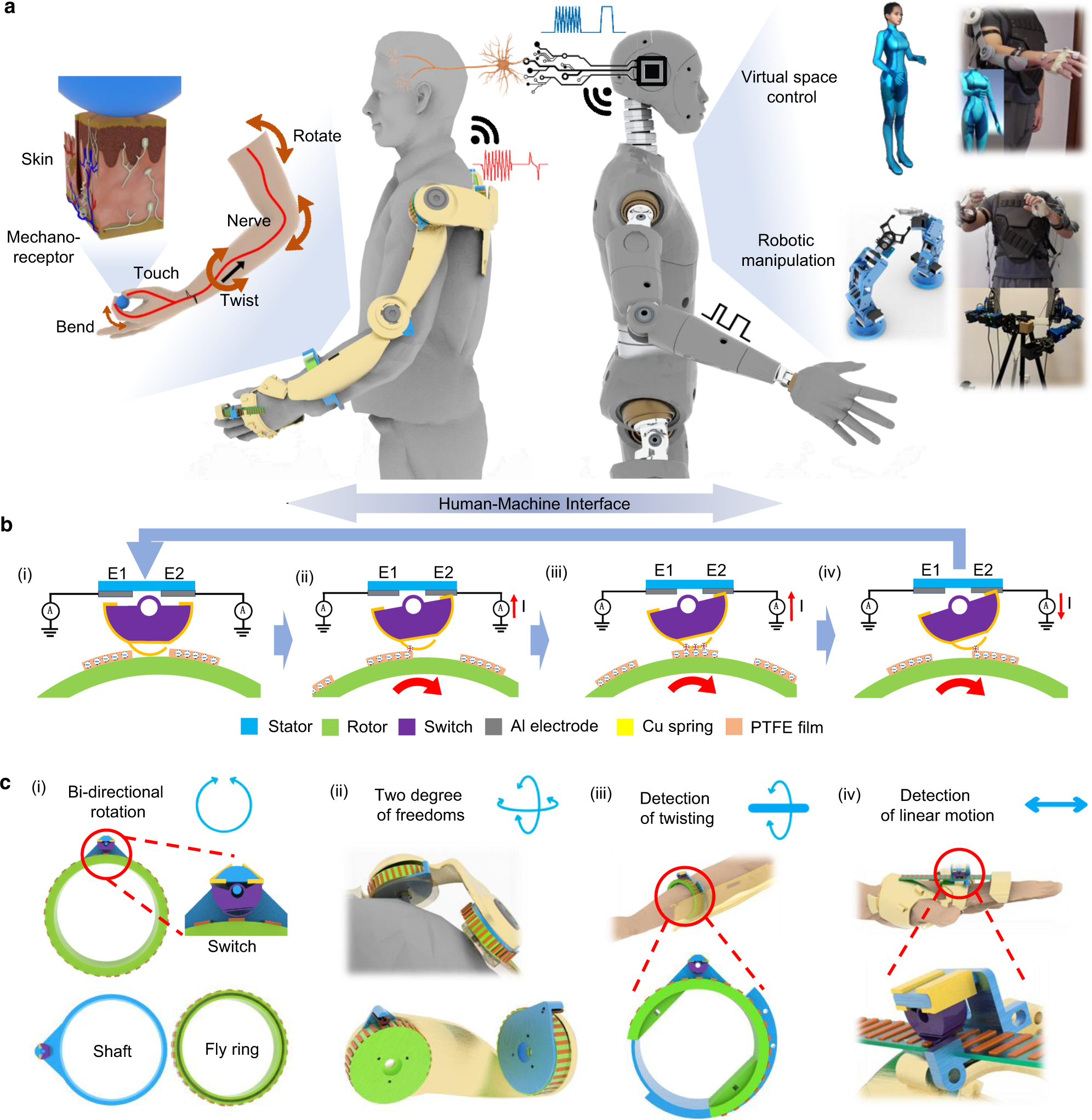
Low cost exoskeleton manipulator using bidirectional triboelectric sensors enhanced multiple degree of freedom sensory system

Kinematics analysis of a 3-DOF joint for a novel hyper-redundant robot arm

Forward kinematics of spherical parallel manipulators with revolute joints

Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Robotics, Free Full-Text
de
por adulto (o preço varia de acordo com o tamanho do grupo)